Projects


A distilary recommender app for recommending distilled spirits based on user’s taste preference. I made this for a client on upwork. This live app is hosted here in distilary-recommender.

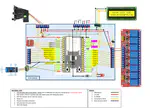
A bomb disposal robot featuring 6-dof arm as my junior year project. This rover was built using Arduino and Raspberry Pi along with various sensor fusion. The 6-DOF arm featured inverse kinematics and it was controlled by a ROS from a desktop app. All the CAD files can be found here on GRABCAD